Vega BS-1
Vega BS-1 Vega BS-2
Vega BS-2 Vega BS-1.2
Vega BS-1.2 Vega BS-2.2
Vega BS-2.2 Vega BS-0.1
Vega BS-0.1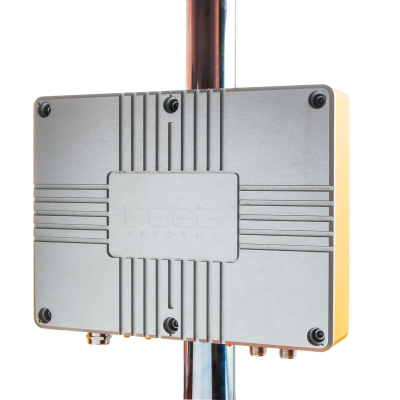 Vega BS-3
Vega BS-3 Antenna 868-01
Antenna 868-01 Antenna 868-01-A10
Antenna 868-01-A10 Vega SI-11
Vega SI-11 Vega SI-12
Vega SI-12 Vega SI-13-232
Vega SI-13-232 Vega SI-13-485
Vega SI-13-485 Vega SI-21
Vega SI-21 Vega SI-23-232
Vega SI-23-232 Vega SI-23-485
Vega SI-23-485 Vega SI-22
Vega SI-22 Vega NB-11
Vega NB-11 Vega NB-12
Vega NB-12 Vega NB-13
Vega NB-13 Vega NB-14
Vega NB-14 Vega NB-15
Vega NB-15 Betar-Vega SHVE/SGVE
Betar-Vega SHVE/SGVE Vega TL-11
Vega TL-11 Vega M-BUS-1
Vega M-BUS-1 Vega M-BUS-2
Vega M-BUS-2 Vega TP-11
Vega TP-11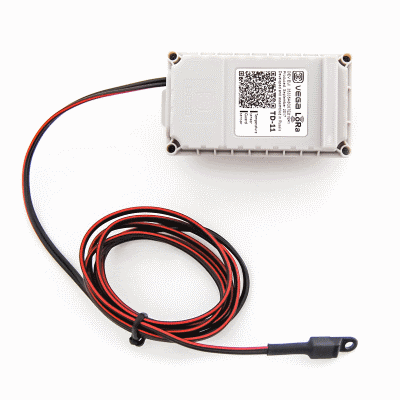 Vega TD-11
Vega TD-11 Vega GM-2
Vega GM-2 Vega SH-2
Vega SH-2 Vega LM-1
Vega LM-1 Vega LM-210
Vega LM-210 Betar-Vega SHVE/SGVE
Betar-Vega SHVE/SGVE CE2726A R01
CE2726A R01 CE2726A W03
CE2726A W03 CE2727A R02
CE2727A R02 CE2727A B04
CE2727A B04 Mercury 206
Mercury 206 Betar-Vega SGBM-1.6
Betar-Vega SGBM-1.6 Vega TS-11
Vega TS-11 Vega Smart-UM0101
Vega Smart-UM0101 Vega Smart-HS0101
Vega Smart-HS0101 Vega Smart-MC0101
Vega Smart-MC0101 Vega Smart-WB0101
Vega Smart-WB0101 Vega TD-21
Vega TD-21 Vega Smart-AS0101
Vega Smart-AS0101 Vega Smart-MS0101
Vega Smart-MS0101 Vega Smart-SS0101
Vega Smart-SS0101 Vega DP-1
Vega DP-1 Vega USB-UART
Vega USB-UART Vega FSK Dongle
Vega FSK Dongle Vega Beacon TH
Vega Beacon TH Vega Beacon S
Vega Beacon S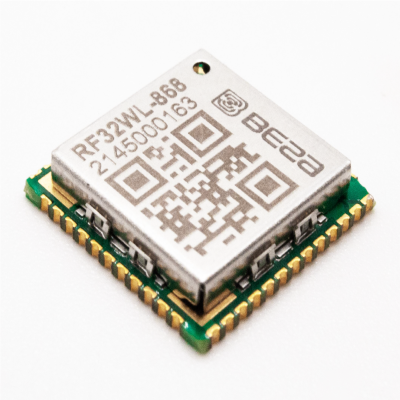 Vega RF32WL
Vega RF32WL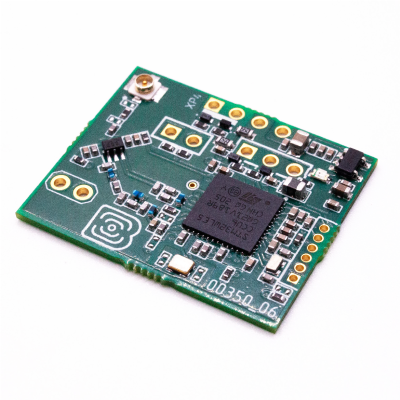 Vega RM868-UFL
Vega RM868-UFL Vega RM868-CPA
Vega RM868-CPA VEKTOR-101
VEKTOR-101 Vega Smart Tab
Vega Smart Tab Vega BP 3.6V
Vega BP 3.6V Vega Smart Tab-S
Vega Smart Tab-S Vega BS-4
Vega BS-4 Vega BS-4 PRO
Vega BS-4 PRO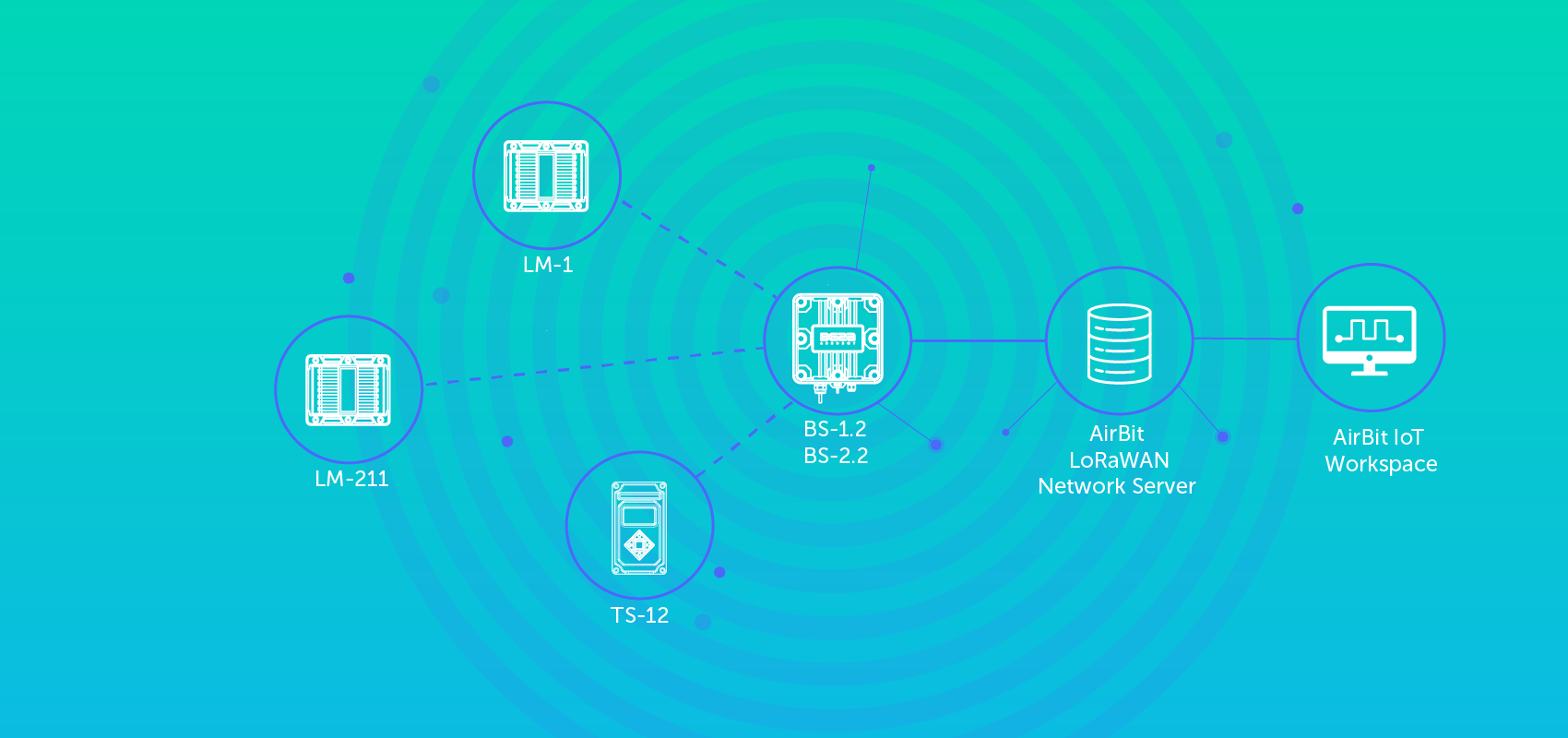
LoRa geolocation allows you to determine the coordinates of a device operating in the LoRaWAN network without using a GPS receiver.
LoRaWAN end device can be discovered if data is received by three or more base stations. The location determination process using the TDoA method is based on triangulation/trilateration. Several BSs simultaneously receive the same packet, record the time and send the data to the network server. Time synchronization on gateways is ensured with nanosecond accuracy. By measuring the signal time delay at each base station, the difference in signal arrival time between stations can be determined. Using known base station coordinates and time differences, triangulation can be used to calculate the location of an object.
- Some of the main advantages of implementing the solution are the following:
- the technology provides communication over long distances between end devices and BS, which makes it possible to track objects over a large area;
- the network can be deployed according to customer needs to provide continuous coverage both indoors and outdoors;
- LoRa geolocation is supported by any existing LoRaWAN end devices, which eliminates additional costs for their modification;
- low power consumption of devices and low cost, exactly what the market now requires;
- To determine the location of an object, a high data rate is not required, so the low transmission rate of LoRa becomes an advantage, ensuring long battery life.
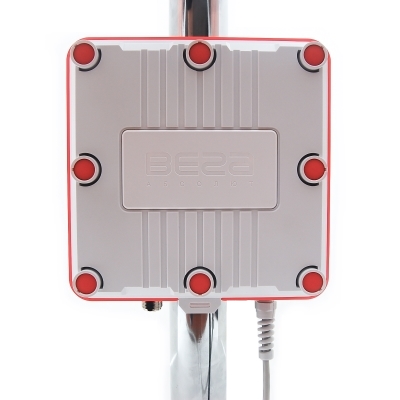
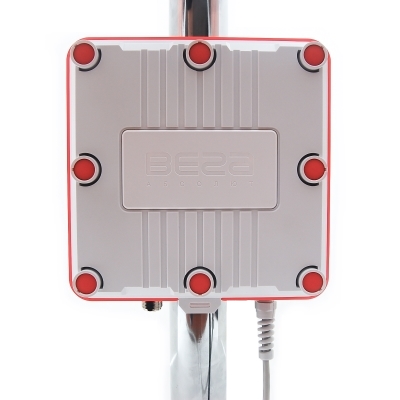
The work was carried out in an open area: Lake Yakhrobolskoye in the Nekrasovsky district of the Yaroslavl region. Three test samples of the Vega BS-2.2 Base Station were deployed with support for the geolocation function at the vertices of a triangle with a side of 2-2.2 km.
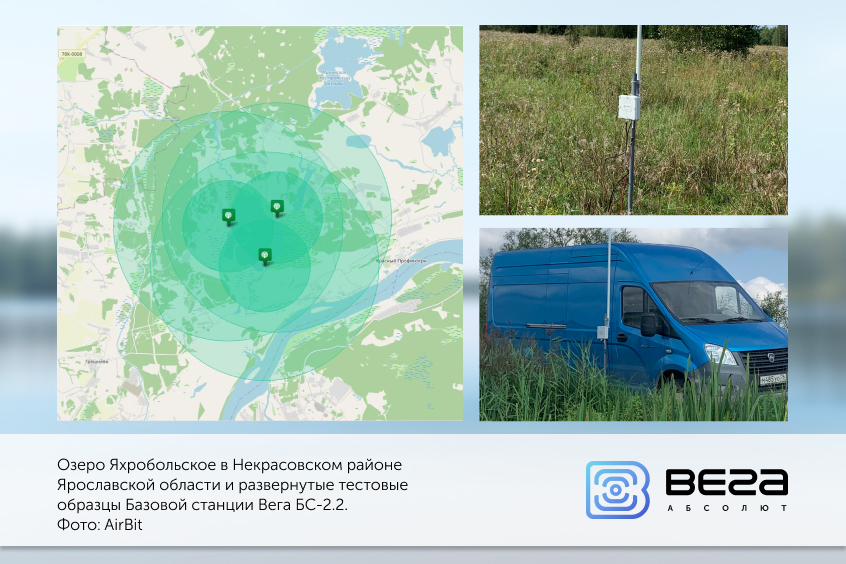
The search devices Vega LM-1, Vega LM-211, network tester TS-12, which moved in a boat across the lake at different speeds, were used as terminal devices.
Every 10 seconds the coordinates of the boats location were recorded by a mobile phone. Data transmission from LoRaWAN devices was carried out every 5 minutes with confirmation. The packets arrived at the AirBit LoRaWAN Network Server.
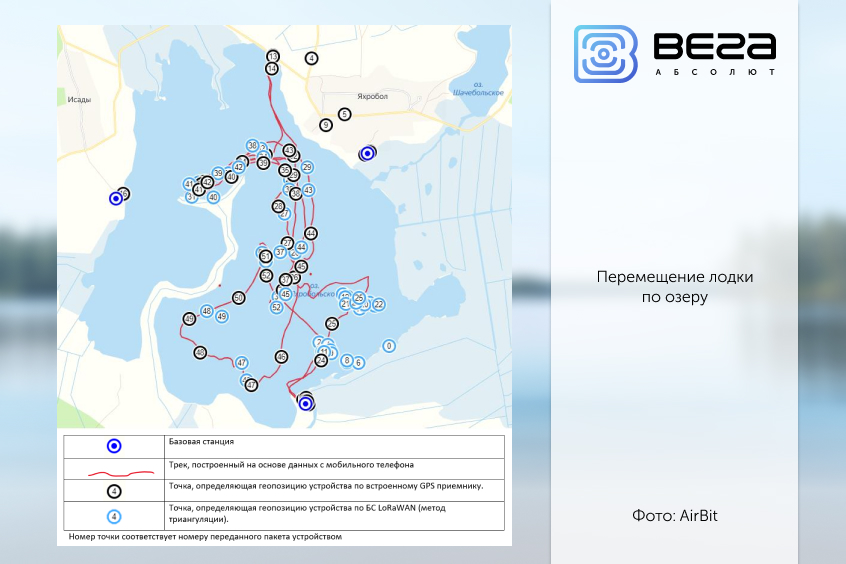
The data obtained were analyzed using the Shapiro-Wilk test and standard methods of mathematical statistics.
- Results:
- It was found that the accuracy of determining the position of an object using the triangulation method falls within the stated interval, which was published by chip manufacturer Semtech when announcing the new SX1303 LoRa Core chip
- Geolocation accuracy can be 75–150 m, depending on related factors.